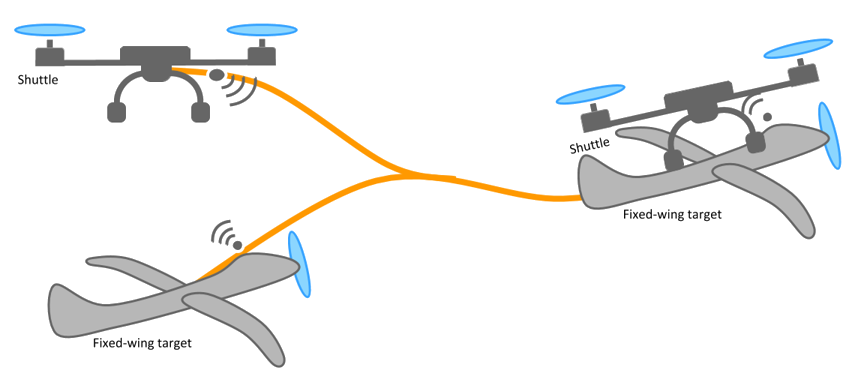
CAPTURE – shuttle drone for launch and capture in cooperative and non-cooperative scenarios
This project aims to address several scientific and technological challenges towards the use of shuttle drones to perform launch and capture maneuvers of other vehicles or objects. A first scenario is considered where the shuttle drones cooperate with the vehicles to be launched or captured, either relaying information about their planned motion or actively synchronizing its motion to facilitate the maneuver. Addressing this scenario enables the design of specialized vehicles for a given task, for instance, having fixed-wing drones with long endurance, while enabling the vertical take-off and landing of these vehicles with shuttle drones. A second scenario involves the launch and capture of objects or other drones, that may not cooperate with the shuttle drones, either passive or actively. In this case, the shuttle drones may act as a security measure to remove drones or objects from restricted areas that may actively avoid being captured. Addressing these scenarios raises interesting scientific and technological challenges, including: optimal and cooperative planning of trajectories for a team of heterogeneous vehicles; cooperative, hybrid, and distributed control for critical rendezvous maneuvers; cooperative and distributed estimation of the motion of the shuttle drones, other vehicles, and the surrounding environment; as well as dealing with estimation, control and planning strategies based differential games for the non-cooperative scenario.
Reference: PTDC/EEI-AUT/1732/2020
DOI: https://doi.org/10.54499/PTDC/EEI-AUT/1732/2020
Funding: Fundação para a Ciência e a Tecnologia (FCT), Portugal

Main contractor: Institute for Systems and Robotics – Lisbon (ISR), LARSYS, Associação do Instituto Superior Técnico para a Investigação e o Desenvolvimento (IST-ID).
Participating Institutions:
- CTS-UNINOVA, NOVA School of Science and Technology;
- Mechanical Engineering Institute (IDMEC), LAETA.
Aerospace Industry partner: Spin.works
![]()
![]()